- מרצה הקורס: דר’ חי אזולאי
רובוט ארבע-רגלי "פלוטו"
הכחלק מחתירתה לחדשנות טכנולוגית, עלה הצורך בחברת רפא"ל לבחון רובוט בעל מבנה ארבע-רגלי לשם תמרון בסביבה מרובת מכשולים. נדרשנו לתכנן רובוט הנשלט על-ידי בקר כפלטפורמה ראשונית, בשאיפה שיהפוך לפרויקט רב-שנתי אשר ישתכלל ויוסיף
יכולות משנה לשנה. כאמת מידה להצלחת הפרויקט ניתנו דרישות תמרון בסיסיות בתנאי מעבדה. במסגרת הפרויקט התחלקנו לצוותי תכן ובקרה, כאשר כל צוות אמון על חלקו, אך נעשית עבודה משותפת ליצירת ממשק יעיל. העבודה החלה בסקר ספרות מעמיק,
המשיכה בבחירת קונספט מכני ובקרתי, תכן חלקי הרובוט ותכנות האלגוריתמים הנדרשים על-מנת לעמוד בדרישות, קבלת הצעות מחיר ובחירת יצרן, הוצאה לייצור, קבלת הרכיבים והרכבתם, ולבסוף ניסויים לבדיקת עמידת הרובוט בדרישות המזמין ומסירתו ללקוח.

לפוסטר רובוט ארבע-רגלי "פלוטו" לחץ כאן
נשר – מערכת אוטונומית להטלת רובוטים מתקדמים
פרויקט זה מהווה חלק ממגמה כוללת של צמצום המעורבות האנושית במתארים בהם קיימת סכנה לחיי אדם. "נשר" הינה מערכת אוטונומית להטלת רובוטים מתקדמים ממרחק אל תוך חללים נסתרים על מנת להשיג יתרון טקטי משמעותי. הרובוטים המתקדמים מצוידים במצלמות, ניתנים לשליטה מרחוק ועמידים לזעזועים ותנאי שטח קשים. על ידי הזנת הנתונים אודות מיקום המטרה, ה"נשר" יודע לחשב את זוויות הצידוד וההגבהה וכן את הכוח הדרוש לשיגור הרובוט. השיגור עצמו מתבצע ברגע בו המשתמש נותן אישור סופי לירי, כאשר לצורך מניעת שיגור בשוגג המערכת מצוידת בשני מנגנוני אבטחה. המערכת מגיעה למוכנות שיגור בתוך כ- 30 שניות מרגע קבלת הנתונים, מכסה טווח רדיאלי של 6 מטרים עם זווית צידוד
של לפחות 180 מעלות, ובעלת יכולת החדרת רובוט לפתח בגודל 1.5X1.5 מטרים. המערכת מיועדת להתקנה על גבי פלטפורמה ניידת בלתי מאוישת.

לפוסטר נשר לחץ כאן
יחידות קצה להרכבת אטם במכסה עבור רובוט UR5
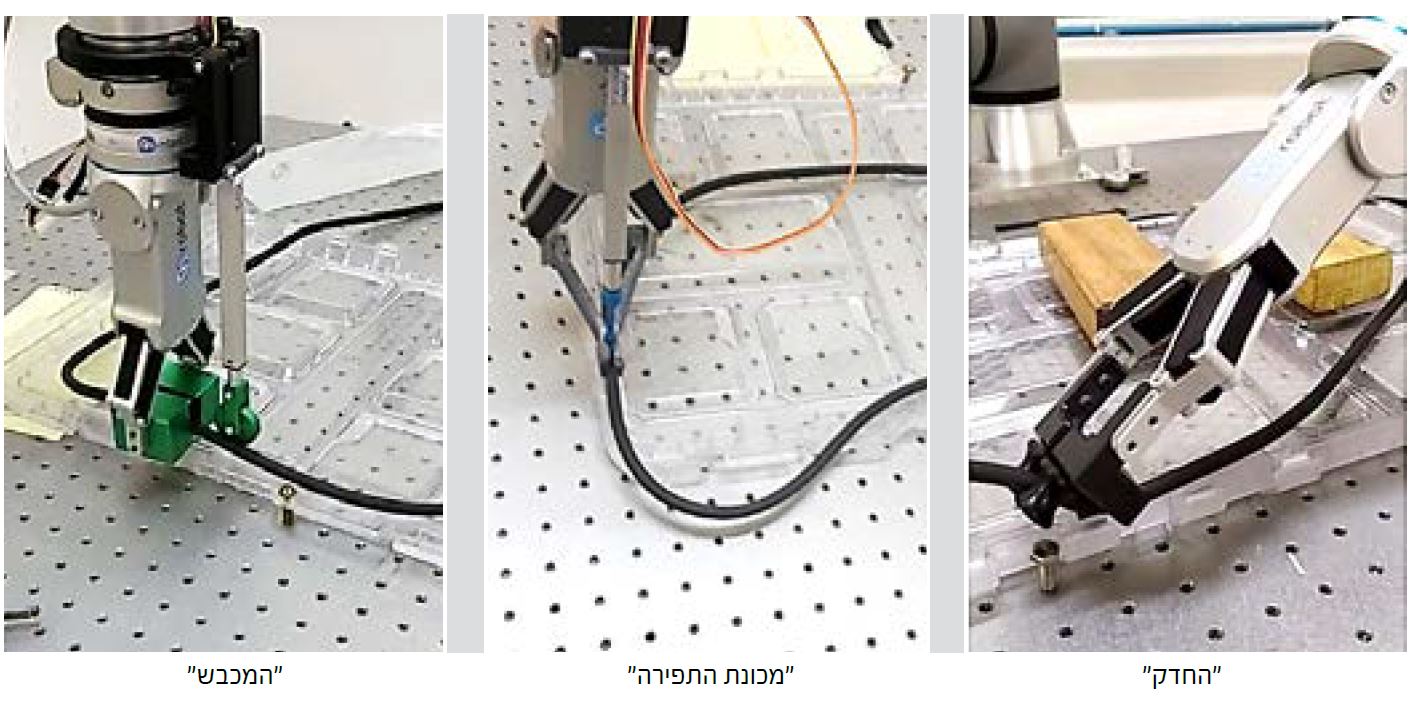
מטרת הפרויקט לייצר יחידת קצה אשר תתממשק אל הזרוע הרובוטית ותאפשר לרובוט להרכיב אטם במסילת מכסה. כל זאת, ללא התאמה לאטם ייחודי או גאומטריה ספציפית ותוך נתינת משוב על ביצוע המשימה. האתגר העומד במרכזו של פרוייקט זה הוא תכנון הממשק בין זרוע רובוטית לרכיבים גמישים ורכים ומישובו. פרויקט זה הינו חלק מתהליך אוטומציה במפעל "כתר פלסטיק". בפרויקט תוכננו ויוצרו שלושה קונספטים הנותנים מענה לדרישות: "החדק",
"מכונת התפירה", ו"המכבש". "החדק" הינו מוצר קשיח ולעומתו "מכונת התפירה" ו"המכבש" משלבים שימוש באקטואטור הנשלט ומבוקר ע"י מיקרו-מעבד "אדרואינו". הקונספטים כוללים חיישנים שונים הנותנים משוב על פעולתם.
לפוסטר יחידות קצה להרכבת אטם לחץ כאן
מתקן להוצאת פיני מיקום בתהליך ייצור סר"מ
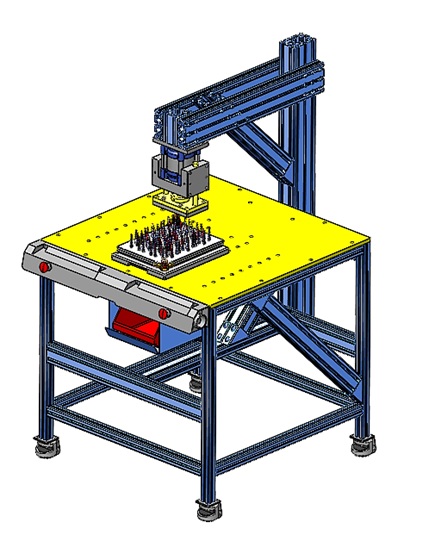
במפעל לייצור סרטים מוליכים נדרש למקם את חומרי הגלם בדיוק רב על גבי משטח התבנית. לאחר מיכן מתבצע תהליך של כבישה באוטוקלאב – תנור חימום משולב לחץ וואקום. מיקום חומרי הגלם בתהליך מתבצע באמצעות מערכת של שתי פלטות אלומיניום וביניהם פיני מיקום בקוטר 3 מ"מ. מספר פיני המיקום תלוי בסוג הסר"מ ובגודלו ועשוי להגיע למאה ועשרים. לאחר הכבישה נדרש להוציא פינים אל ו אשר דבוקים בהיקפם לתבנית ולסר"מ. המתקן מורכב מבוכנה פניאומאטית קבועה במקום, משטח עבודה, ופלטת זיהוי. פלטת הזיהוי דומה לפלטה העליונה בתבנית ואליה מחוברות דרנים קפיציים. עובד המפעל מזיז את הפלטה על גבי
משטח העבודה עד שהדרנים הקפיציים נמצאים מתחת לבוכנה ואז לוחץ על כפתור להפעלה הבוכנה. הבוכנה דוחפת את הדרנים הקפיציים שעוברים דרך מערכת הפלטות ודוחפות
החוצה את פיני המיקום לתוך מיכל איסוף וניקוי הפינים
לפוסטר מתקן להוצאת פיני מיקום לחץ כאן
תכן התקן לכיסא גלגלים עבור חולי המיפלגיה
שיתוק חצי גופי הוא אחד התופעות לוואי הנפוצות לאירוע מוחי או קורה כתוצאה ממום מולד. השיתוק הוא תוצאה של נזק הנגרם למרכז המוטורי במוח. הנזק מתבטא בחולשה או שיתוק מלא בצד אחד של הגוף. המוצר נועד לאפשר לאנשים אלה לתפעל כיסא גלגלים באופן
עצמי ללא התפשרות בפונקציונליות הכיסא. כיום קיימים כסאות גלגלים ייעודיים לחולים אלו אך, הם יקרים, מסורבלים ולא תמיד בעלי ביצועים מספקים. נדרשנו לתכן מערכת הנעה מכנית המופעלת ונשלטת באמצעות צד אחד של הגוף )יד ורגל(. המתקן מיועד לחיבור מהיר ופשוט לכיסא גלגלים סטנדרטי. בוצעו חישובים ואנליזות בכדי להתאים את ביצועי תכן המתקן ליכולות הפיזיות של החולים. יוצרו שני פתרונות )המוצגים בתמונות(: האחד – ניהוג בגלגל קדמי אחד, השני ניהוג בשני הגלגלים הקדמיים המחוברים ביניהם.

לפוסטר התקן לכיסא גלגלים עבור חולי המיפלגיה כאן
שיפורים בעגלת התחזוקה של רכב ה OHV
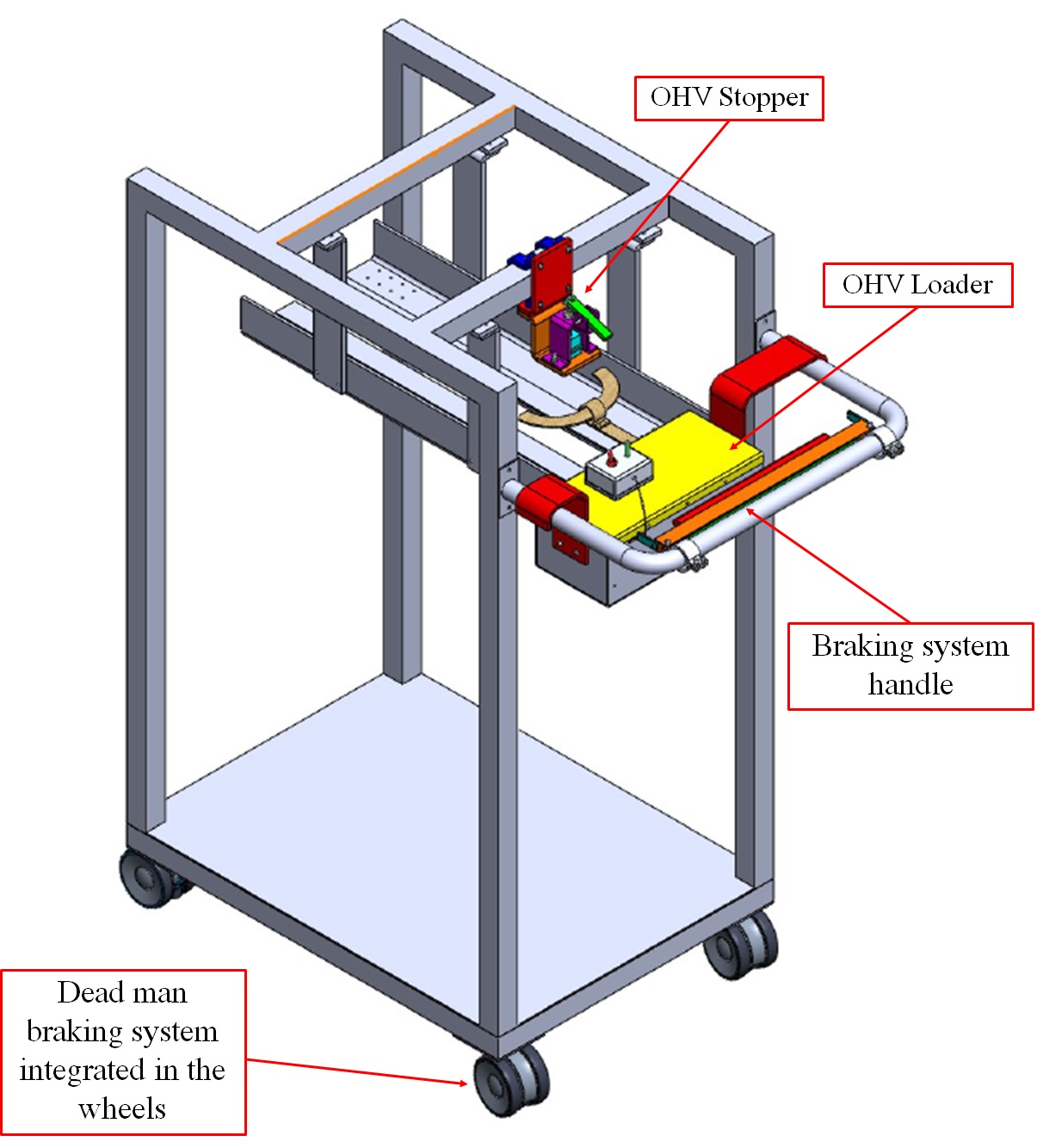
הפרויקט הוזמן על ידי חברת אינטל, יצרנית מוליכים למחצה. תהליך הייצור מתרחש בסביבת חדר נקי ושינוע המוליכים במפעל מתבצע על ידי רכבים אוטונומיים הנקראים OHV . תחזוקת הרכבים מתרחשת על גבי עגלת תחזוקה הנקראת Maintenance cart.
הדרישה העיקרית של הלקוח הייתה שיפור בטיחות השימוש בעגלה על ידי תכנון מחדש של הגובלים של רכבי ה OHV ומערכת הבלימה.
בנוסף שיפרנו את תהליך העמסת הרכב על גבי העגלה. פתרנו את הבעיות על ידי תכנון של מערכת בלימה אוטונומית שבולמת את העגלה כברירת מחדל ומשחררת את הגלגלים רק על
ידי פעולה אקטיבית של המשתמש , גובלים אוטונומיים שמופעלים אוטומטית בהעמסת הOHV ומערכת חשמלית של העמסת ה OHV על גבי העגלה .
לפוסטר שיפורים בעגלת תחזוקה לחץ כאן
פגיעה במהירות ידועה
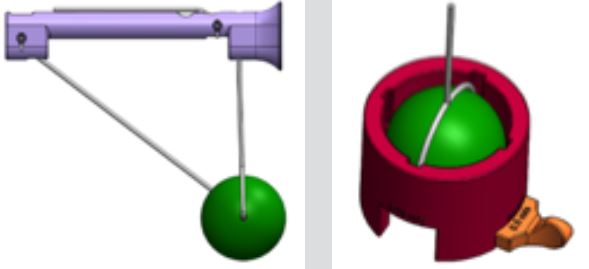
כחלק מהניסויים שיש לבצע על גופים תעופתיים, נדרש להרעיד את הגוף על ידי מכה ולבדוק את תגובתיו למציאת תדר עצמי ופרמטרים נוספים. בשל היחודיות של המוצרים המיוצרים ברפאל, נדרש לבצע את הבדיקה במקומות קטנים, לא נגישים ובגבהים משתנים, מה שמונע שימוש בפטיש מודלי בגלל הצורך לחיבור מתמיד למחשב. כפתרון לבעיה יוצר כדור מודלי שלפי הגודל, החומר והצורה הספרית שלו ניתן לחשב את הערכים הדרושים כך שרק הגוף מחובר אל המחשב למדידת ההשפעה. על מנת להשתמש בכדור המודלי באופן מיטבי נדרש לדעת את מהירות הפגיעה של הכדור בגוף, נתון זה בעל חשיבות רבה לאיכות התוצאות של הסימולציות.
מטרת הפרויקט היא לתכן ולייצר מתקן המבטיח את מהירות הפגיעה של הכדור בגופים שונים.
לפוסטר פגיעה במהירות ידועה לחץ כאן
תכן תרמו-מכני של מתקן לאפיון "צינורות חום"
כחלק מתהליך הפיתוח והייצור של האמצעים השונים ברפאל, נעשה שימוש ברכיבים אלקטרוניים ואחרים במערכות השונות, אשר כידוע לנו, נוטים להתחמם/ פולטים חום בעת השימוש בהם.
אי לכך, נדרש לתכנן פתרון לסילוק והרחקת החום של הרכיבים. אחד הפתרונות המקובלים לצורך סילוק החום וקירור רכיבים אלקטרוניים ורכיבים אחרים בתעופה ובמוצרים צבאיים מגוונים במערכות השונות הינו שימוש בצינורות חום HEAT PIPES.
אנו נדרשים לתכנן ולייצר מתקן המכיל 5 מערכי בדיקה שייבדקו בו זמנית, המיועד לאפיון ביצועים תרמיים של צינורות חום תחת תנאי שפה שונים (קטרים ואורכים שונים של צינורות חום, כמו גם עבור אוריינטציות שונות).
המתקן יאפשר בדיקה דינמית ומימוש אוריינטציה משתנה ובעל יכולת להתממשק עם בקרה ותוכנה ע"מ להנגיש את המידע המתקבל ממימוש אלגוריתמי בדיקה לצורה גרפית מהירה.

לפוסטר מתקן לאפיון "צינורות חום" לחץ כאן
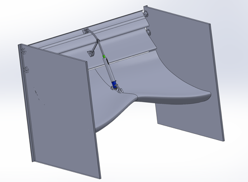
תא נוסעים לרכב בעל יכולת תעופה
מטרת הפרויקט היית ה לתכנן כלי תחבורה דואלי המסוגל לנוע על הקרקע ולשמש כתא נוסעים מוטס , כאשר מאפייניו הבולטים הינם המראה ונחיתה אנכית וכן יכולת ניתוק של האלמנטים התעופתיים כך שיוכל לשמש את הנוסעים גם לנהיגה עירונית. העקרונות המובילים
של פרו יקט זה הינם ביצוע תכן שיניב משקל נמוך ככל הניתן למול חוזק גבוהה, עמידה בתקני כביש ותקנים תעופתיים ותכנון מנגנון מעבר בין תצורת אוויר לתצורת כ ביש. תא הנוסעים מורכב מ: תא הבנוי משלדת מונו-קוק ( Monocoque ) כאשר החוזק המבני מגיע ממוטות אלומיניום בשילוב עם מעטפת מחומרים מרוכבים. מערכות היגוי מתלים ובלימה – מתבססים על המערכות הקיימות ברכב מסוג Toyota Aygo . מנגנון קיפול גלגל אחור י- תכן ייעודי תפקידו לקפל/לפרוס את הגלגל האחורי בעת חיבור/ ניתוק מגוף כלי הטייס . ממשק הובלה לחיבור אל גוף המטוס- מוטות הרמה הממוקמים בחלקו האחורי של תא הנוסעים ותפקידם להוביל את תא הנוסעים אל גוף המטוס בעת החיבור אליו .

לפוסטר תא נוסעים לרכב בעל יכולת תעופה לחץ כאן
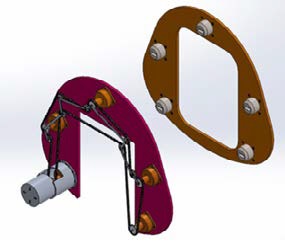
מערכת חיבור כנפיים לתא נוסעים
לצורך בניית כלי המסוגל לשמש לנסיעה על כביש ולטיסה תכננו מערכת חיבור וניתוק בין תא נוסעים למכלול כנפיים. המערכת מורכבת מ 5- מנגנונים, כל אחד מסגנון סגר רבע סיבוב. בחלק האחורי של תא הנוסעים קיימת שרשרת המחברת בין חמשת המנגנונים, ומבטיחה שהמנגנונים ינעלו יחד. השרשרת מונעת על ידי מנוע DC המחובר אליה דרך תמסורת. למנוע בלם פנימי המשמש כאבטחת נעילה. כדי לנתק את החיבור, מספקים מתח בכיוון ההפוך על מנת לסובב את המנוע לכיוון השני. במערכת קיימים חיישני כוח כדי לאותת למשתמש האם הנעילה התבצעה.
לפוסטר מערכת חיבור כנפיים לתא נוסעים לחץ כאן
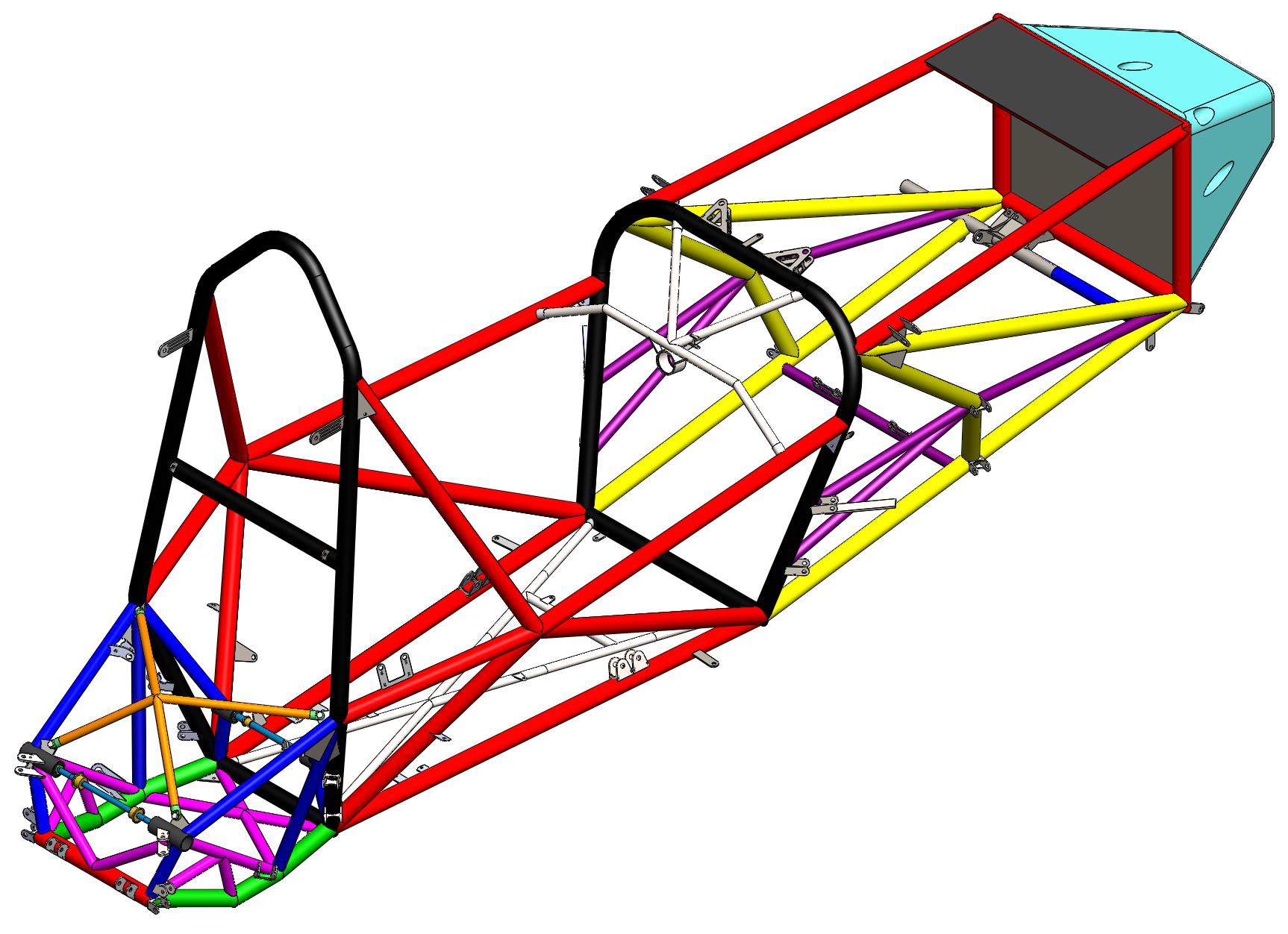
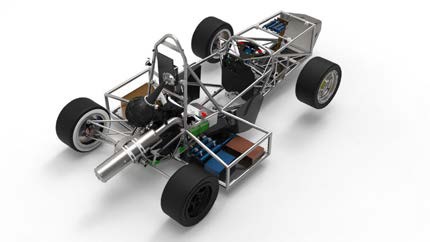
תכן שלדה לרכב פורמולה טכניון 2020
מטרת הפרוייקט היתה לתכן ולייצר את שלדת רכב הבעירה של פורמולה טכניון 2020 . התחלנו לתכן את השלדה על בסיס המבנה הגיאומטרי שהוצג לראשונה ב 2018- . המטרות העיקריות בתכן השלדה הן הפחתת המשקל והגדלת הקשיחות, תוך היצמדות לדרישות תקנון התחרות. שלדת 2019 היתה קלה מאוד אך לא היתה קשיחה במידה שנדרשנו אליה. פנינו לסימולציות אלמנטים סופיים על מנת למצוא דרכים לשיפור יחס קשיחות-משקל של השלדה, וכן למציאת דרכים חדשות לשימוש בחומרים מרוכבים ומתכות מתקדמות (בעיקר
טיטניום) בתכן שלנו.
לפוסטר תכן שלדה לרכב הפורמולה כאן
פיתוח מערכות מתלים ומכלול גלגל, פורמולה סטודנט 2020
תפקיד מערכות המתלים והגלגל הוא שמירה על חלוקת משקל אופטימלית ופרמטרים דינמיים נוספים שמובילים לביצועיים מקסימליים במרוץ, לדוגמא אחיזה מרבית בפניות וריסון הפרעות
מהכביש. לאורך הפיתוח התמקדנו במיוחד על הורדת המשקל של החלקים השונים במערכות בעוד שאנו משיגים את הביצועים הרצויים, עומדים במקדם הביטחון הרצוי ושומרים על קשיחות מרבית. לשם הורדת משקל ניסינו בפעם הראשונה הדפסה תלת ממדית מטיטניום
לחלקים במערכת הגלגל, החלקים הללו תוכננו בעזרת אופטימיזציה טופולוגית. כמו כן, חלק ממוטות המתלים הוחלפו במוטות מסיבי פחמן, ובפעם הראשונה הקבוצה פיתחה מסרק הגה שאינו קנוי והנו קל יותר מהאלטרנטיבה בשוק.

לפוסטר מערכות מתלים ומכלול הגלגל לחץ כאן
מערכת הפחתת גרר פרויקט פורמולה 2020
מערכת הפחתת גרר תוכננה לפעם הראשונה בשנת 2019 . הרעיון היה אם נשנה את זווית הכנפונים האחוריים נאפשר שליטה עם כוח הגרר והעילוי ונוכל להפחית את הגרר בזמנים שצריכים מקסימום מהירות. השנה תיכננו את המערכת מחדש עם מנגנון שונה כך שהיה מקבלת נתונים ממחשב הרכב כמו מהירות הרכב וזווית ההגי, שנוכל להחליט מתי לפתוח ולסגור את הכנפונים. השליטה על הכנפונים מתבצעת ע״י בוכנה חשמלית מחוברת אל הכנפונים והמנוע על המערכת.
לפוסטר מערכת הפחתת גרר לחץ כאן
הסבת רכב פורמולה בעירה 2019 לאוטונומי – אינטגרציה ושלדה
הצוות ביצע שינויים במודל השלדה הקיים מרכב בעירה 2019 תוך עמידה בדרישות התקנון ואילוצי המערכת והתחשבות בממשקים לקבוצות האקטואציה, חשמל ומחשבים של הרכב. האתגרים העיקריים לצוות היו מציאת מקום לרכיבים השונים (מחשב, בקרים, מכלי לחץ) תוך התחשבות בממדיהם הגדולים, הקפדה על נגישות גבוהה עבור הצוותים אשר מתפעלים אותם, שמירה על מרכז כובד נמוך ועמידה בחוקי התקנון הנוקשים. המערכת כוללת צינורות פלדה
אשר מהווים את שלדת הרכב ואת מסבכי הצינורות למיקום הרכיבים, ברקטים לחיבור המערכות ופלטות מתכת להחזקת הרכיבים.
לפוסטר הסבת רכב פורמולה בעירה לאוטונומי לחץ כאן
אקטואציה אוטונומית לבלמים ומערכת EBS
פרוייקט זה – הוא חלק מפרוייקט הפורמולה האוטונומי של שנת 2020. מטרת הפרוייקט היא לבצע תהליך תכן מלא של מערכת אקטואציה אוטונומית לבלמים של הרכב ומערכת בלימת חירום (EBS). מערכות תוכננו בהתאם לחוקי התחרות FSD . מערכת אקטואציית הבלמים
מורכבת ממנוע חשמלי – אקטואטור לינארי המבוסס על בורג הנעה, אשר מופעל על ידי מערכת בקרה ולוחץ על דוושת הבלם בזמן הפעלתו. מערכת EBS – היא מערכת בלימת חירום, אשר אמורה לבלום את הרכב בזמן חירום עד עצירה מלאה, כאשר יש נפילה של מתח חשמלי. מערכת זאת מורכבת משתי בוכנות פנאומטיות אשר מופעלות על ידי מיכל גז. בעת חירום בוכנה אחת מופעלת על דוושת הבלם. במידה ובוכנה זאת לא תופעל על ידי מיכל גז עקב תקלה כלשהי, הבוכנה שנייה תופעל במקומה. במהלך הפרוייקט בוצעו, בין היתר, אנליזות חוזק על מנת לוודא כי מערכות עומדות בכל העומסים הפועלים עלין בעת נסיעת הרכב.

לפוסטר אקטואציה אוטונומית לבלמים ומערכת EBS לחץ כאן